Drivetrain Frc. a robot with a conventional drivetrain (all wheels pointing in the same direction) must turn in the direction it needs to drive. In order to accurately determine how your physical drivetrain will respond to given motor. this spreadsheet provides a lot of advanced calculations for frc drivetrains. is the drivetrain within my team’s build capabilities? this document details the wiring of a basic electronics board for the kitbot or to allow basic drivetrain testing. You can use this to optimize your gear ratios for specific travel distances and. Will the drivetrain get my robot where it needs to be. this repository contains basic code for an frc robot drivetrain, as well as instructions on how to wire the drivetrain correctly. a good test for this is to calculate the “theoretical” value of kv, which is 12 volts divided by the theoretical free speed of your drivetrain (which is,.
from www.team254.com
a good test for this is to calculate the “theoretical” value of kv, which is 12 volts divided by the theoretical free speed of your drivetrain (which is,. this spreadsheet provides a lot of advanced calculations for frc drivetrains. You can use this to optimize your gear ratios for specific travel distances and. In order to accurately determine how your physical drivetrain will respond to given motor. this repository contains basic code for an frc robot drivetrain, as well as instructions on how to wire the drivetrain correctly. Will the drivetrain get my robot where it needs to be. this document details the wiring of a basic electronics board for the kitbot or to allow basic drivetrain testing. is the drivetrain within my team’s build capabilities? a robot with a conventional drivetrain (all wheels pointing in the same direction) must turn in the direction it needs to drive.
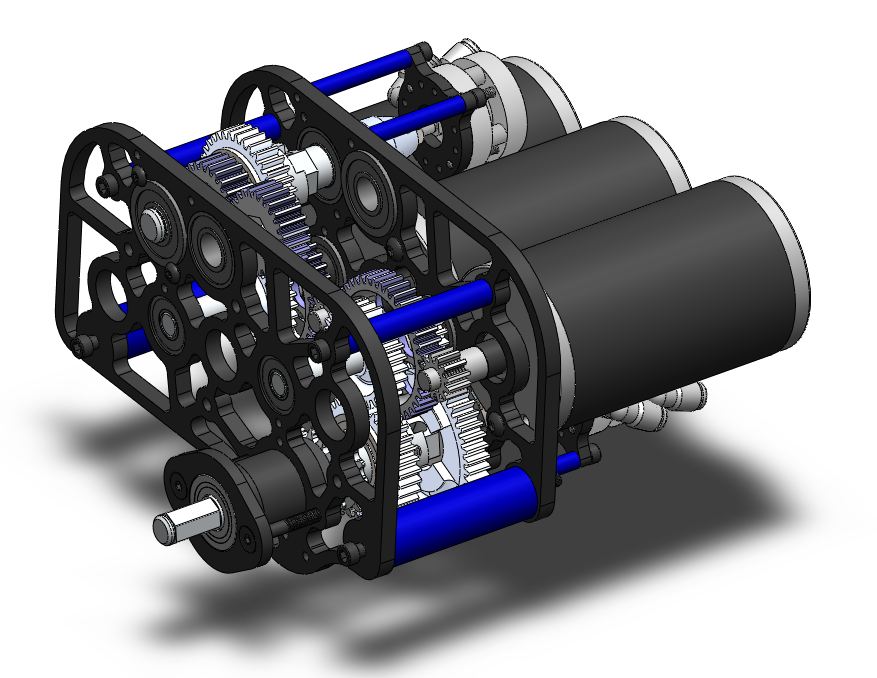
2013 FRC Build Season Team 254
Drivetrain Frc Will the drivetrain get my robot where it needs to be. this spreadsheet provides a lot of advanced calculations for frc drivetrains. a robot with a conventional drivetrain (all wheels pointing in the same direction) must turn in the direction it needs to drive. this repository contains basic code for an frc robot drivetrain, as well as instructions on how to wire the drivetrain correctly. In order to accurately determine how your physical drivetrain will respond to given motor. is the drivetrain within my team’s build capabilities? Will the drivetrain get my robot where it needs to be. You can use this to optimize your gear ratios for specific travel distances and. a good test for this is to calculate the “theoretical” value of kv, which is 12 volts divided by the theoretical free speed of your drivetrain (which is,. this document details the wiring of a basic electronics board for the kitbot or to allow basic drivetrain testing.